
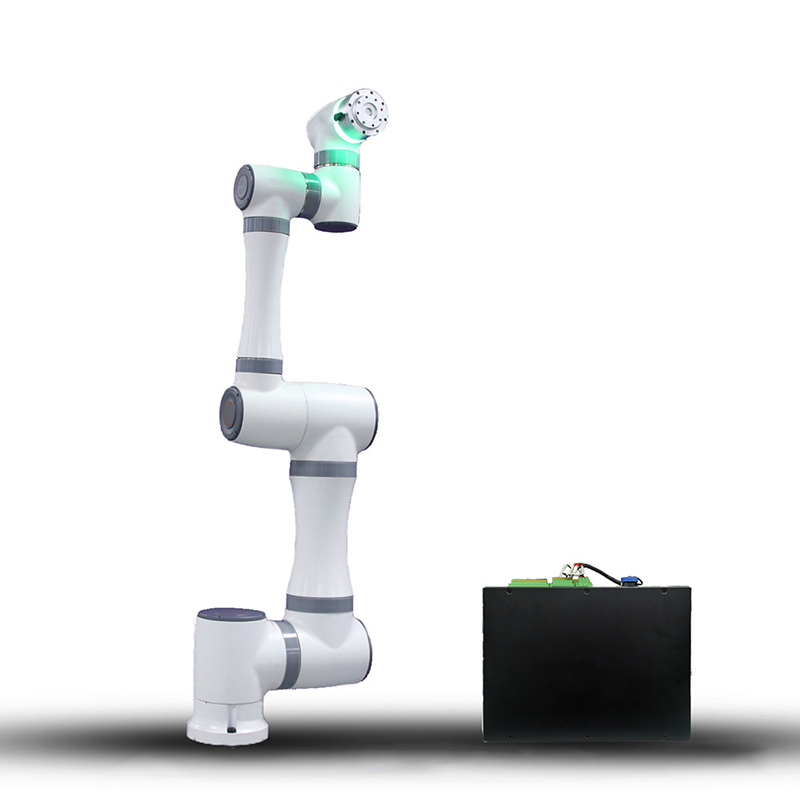



Интеллектуальная совместная роботизированная рука
1. Оснащенный высокоточными датчиками силы, он может определять силу контакта с телом человека или другими объектами в режиме реального времени. .
2. Поверхность манипулятора робота гладкая, без острых краев и зазоров, а соединения закруглены, чтобы снизить риск защемления или царапин операторов во время контакта.
3. Обычно он имеет несколько степеней свободы, может достигать сложных и разнообразных траекторий движения в трехмерном пространстве и может гибко достигать разных положений и углов.
4. Он изготовлен из легких материалов, имеет компактный дизайн, легкий вес, его легко перемещать и устанавливать. Его можно быстро развернуть в различных сценариях работы.
5. Поддерживает режим программирования обучения. Оператор может вручную перетащить манипулятор робота в заданное положение и положение, записать траекторию движения и параметры действий, а манипулятор робота может автоматически воспроизвести рабочий процесс.
Интеллектуальный коллаборативный робот-манипулятор — это инновационное промышленное оборудование, которое объединяет передовые технологии искусственного интеллекта, прецизионную механическую конструкцию, мультимодальное зондирование и эффективные функции взаимодействия человека с компьютером.

Роботизированная рука, изготовленная из легких и прочных материалов, таких как высокопрочный алюминиевый сплав или углеродное волокно, обладает хорошей жесткостью, а ее вес эффективно контролируется, что обеспечивает быструю и гибкую реакцию на движения.

Он оснащен богатым набором быстрозаменяемых концевых эффекторов для адаптации к различным сценариям сложных задач. Для захвата и работы с мелкими деталями он оснащен высокоточными пневматическими захватами или электрическими захватами, а пальцы захвата изготовлены из специального материала. гибкие материалы и адаптивный дизайн.

Комплексная и усовершенствованная сенсорная система интегрирована для обеспечения ключевой поддержки интеллектуального сотрудничества и высокоточной работы. Датчики силы широко распространены в суставах и концевых эффекторах руки робота для отслеживания информации о силе и крутящем моменте руки робота во время движения и работы в режиме реального времени.

В основе высокопроизводительного многоосного контроллера движения лежат интеллектуальные алгоритмы управления, оптимизированные для интеллектуального сотрудничества и высокоточной работы. В то же время система управления также поддерживает различные протоколы связи и интерфейсы.

Использование передовых алгоритмов глубокого обучения и технологии компьютерного зрения позволяет роботу разумно воспринимать и понимать сложную рабочую среду и действующие объекты.

Основываясь на алгоритмах обучения с подкреплением и моделях машинного обучения, робот-манипулятор может принимать автономные решения и выбирать оптимальную стратегию работы в различных сценариях задач.

Был разработан усовершенствованный совместимый алгоритм управления, позволяющий роботизированной руке демонстрировать податливость и гибкость, аналогичную человеческой руке, при взаимодействии с внешней средой.

Он может широко использоваться в различных производственных звеньях различных отраслей, таких как производство электроники, автомобилестроение, оборудование, логистическое складирование, образование и научные исследования, и может адаптироваться к различным типам рабочих задач и требованиям производственной среды.




