


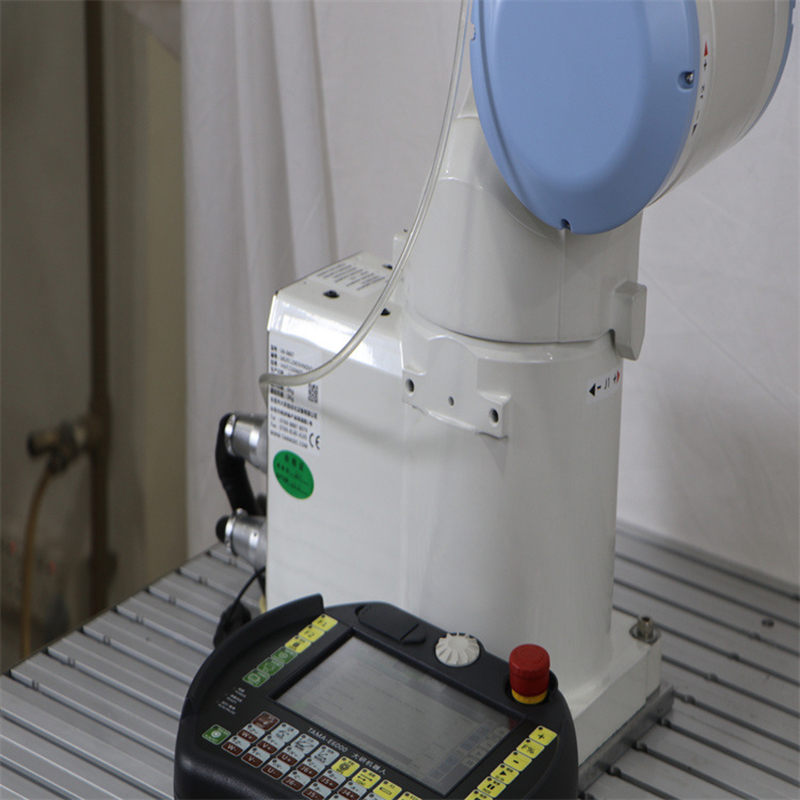

Легкий коллаборативный робот-манипулятор
1. Его легкая конструкция делает силу удара, создаваемую роботом во время движения, относительно небольшой.
2. Оснащенный современными датчиками силы и чувствительными сенсорными системами, он может отслеживать внешнюю силу в режиме реального времени.
3. Благодаря высокой безопасности он может работать в тесном контакте с людьми, находящимися в одном помещении, что улучшает использование пространства.
4. Он имеет небольшой вес, его легко переносить и перемещать, его можно быстро развернуть в различных рабочих положениях и адаптировать к различным сценариям работы и требованиям задач.
5. Он имеет небольшой размер и компактную конструкцию, может свободно перемещаться и работать в небольшом пространстве.
Легкий коллаборативный манипулятор — это инновация в области промышленной автоматизации, разработанная с учетом потребностей современного производства в гибкости, безопасности и эффективности.

Благодаря высокоточным датчикам силы и передовым алгоритмам робот может точно определять силу контакта с внешней средой и регулировать свое движение и силу в реальном времени.

Оснащенный передовыми визуальными датчиками и алгоритмами обработки изображений, робот может быстро и точно идентифицировать и определять местонахождение целевых объектов. Система визуального распознавания и позиционирования также поддерживает функции автономной навигации и планирования пути робота.

Легкий коллаборативный манипулятор разработан с упором на быстрое развертывание и простоту программирования, имеет модульную структуру и удобен в установке.

Гибкое движение с несколькими степенями свободы позволяет ему выполнять сложные рабочие задачи на небольшом пространстве. Конечный эффектор манипулятора робота можно быстро заменить, чтобы адаптировать его к различным инструментам в соответствии с различными требованиями задач.

Высокоточная шарнирная передача и усовершенствованные алгоритмы управления движением позволяют манипулятору робота достигать точного управления положением и планирования траектории, а точность повторного позиционирования может достигать субмиллиметрового уровня или даже выше.




