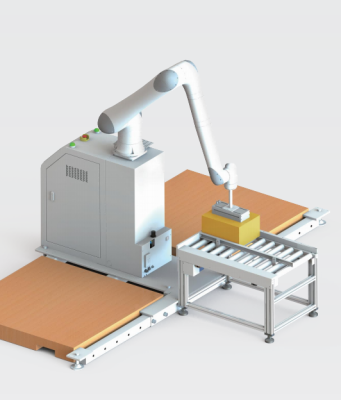
Конструкция робота-манипулятора для паллетирования Bremetz
С развитием технологий искусственного интеллекта интеллектуальные роботизированные руки все чаще используются в промышленном производстве. Интеллектуальный робот-манипулятор — незаменимое оборудование в современной промышленности, которое состоит из трех частей: исполнительного механизма, приводного механизма и механизма управления.
С развитием технологий искусственного интеллекта интеллектуальные роботы-манипуляторы все чаще используются в промышленном производстве. Интеллектуальный робот-манипулятор — незаменимое оборудование в современной промышленности, которое состоит из трех частей: исполнительного механизма, приводного механизма и механизма управления. Объединив такие части технологии, как визуальное распознавание, технология восприятия и алгоритмы обучения, Бреметц делает роботизированную руку гибкой и эффективной для решения различных задач.
Исполнительный механизм является основной частью интеллектуальной руки робота, которая включает в себя суставы кисти, запястья, руки и руки. Эти суставы могут имитировать движение человеческой руки, выполняя хватательные, вращательные, переводящие и другие функции. Благодаря различным формам, материалам и конструкциям приводы могут адаптироваться к различным рабочим условиям и эксплуатационным требованиям.
Приводной механизм является важной частью интеллектуальной руки робота, которая отвечает за обеспечение мощности для движения исполнительного механизма. В зависимости от различных источников энергии приводной механизм можно разделить на четыре категории: гидравлический, пневматический, электрический и механический. Гидравлический приводной механизм обладает высокой несущей способностью и стабильностью, что подходит для работы с большими нагрузками; Механизм пневматического привода имеет высокую скорость срабатывания, что подходит для сцен с высокими требованиями к скорости. Механизм электропривода отличается точным управлением и высоким энергопотреблением; Механический приводной механизм имеет простую конструкцию и низкую стоимость.
С точки зрения управления манипулятором существует два вида управления движением и непрерывного управления. Точечное управление подразумевает работу кнопки или переключателя, с помощью которых можно постепенно управлять манипулятором робота, который подходит для некоторых простых рабочих задач. Непрерывное управление осуществляется компьютерами или другими интеллектуальными устройствами, которые могут обеспечить контроль в реальном времени и точное позиционирование роботизированной руки, подходящее для сложных производственных линий или точных операций.

Подводя итог, можно сказать, что интеллектуальная рука робота состоит из трех частей: исполнительного механизма, приводного механизма и механизма управления. Благодаря их совместной работе робот-манипулятор может выполнять множество сложных операционных задач. Привод включает в себя такие компоненты, как кисть, запястье, рука и рука для захвата, манипулирования и перемещения объектов. Механизм привода обеспечивает мощность и крутящий момент и может быть в виде гидравлического, пневматического, электрического или механического привода. Механизм управления получает инструкции или информацию от датчиков и преобразует их в управляющий сигнал для привода и приводного механизма для достижения точной работы роботизированной руки.
Ключом к созданию интеллектуальной роботизированной руки является интеллект и точность ее системы управления. Благодаря алгоритмам и сенсорным технологиям роботизированная рука может чувствовать и понимать окружающую среду и принимать соответствующие решения и действия. Например, видеодатчики могут помочь манипулятору робота идентифицировать и определить местонахождение объектов, а датчики силы могут определять силу захвата, позволяя манипулятору робота выполнять точный захват и манипулирование. В то же время применение технологий машинного обучения и искусственного интеллекта также позволяет роботизированной руке улучшить свою производительность и адаптируемость посредством обучения и оптимизации.
Короче говоря, состав и технология управления интеллектуальной роботизированной руки являются ключом к достижению точной работы. Бреметц считает, что благодаря постоянному прогрессу науки и техники интеллектуальные роботизированные руки проявят свой большой потенциал во многих областях и принесут больше удобства и пользы в работу и жизнь людей.