





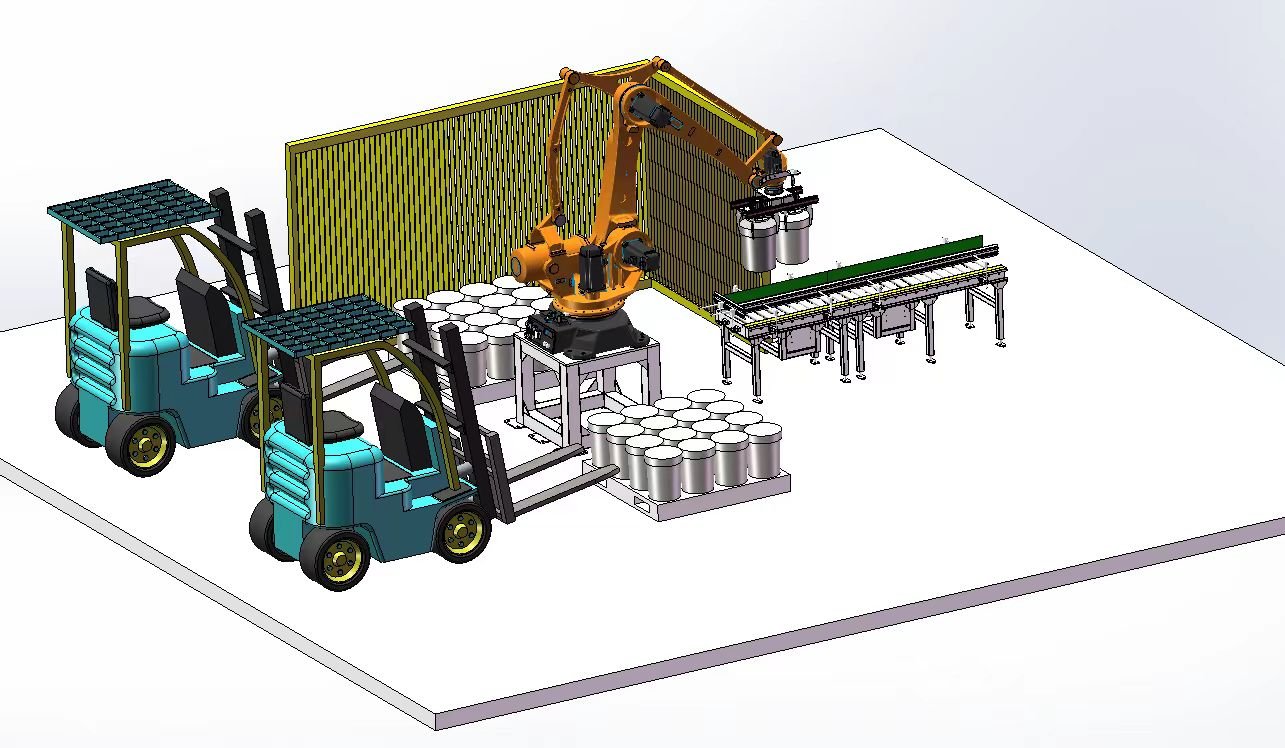



Автоматический совместный паллетайзер
Многосуставная машина похожа на человеческую руку и отличается способностью двигаться гибко, как человеческая рука. Например, при столкновении с препятствием многосуставной робот может обойти препятствие и достичь цели, что сложно для промышленного робота с обычной полярной или цилиндрической координатой. Если необходимо выполнить какие-то специальные движения (кривошипное движение), многосуставной робот также проще выполнить. Многосуставной робот также может перемещаться из одной точки в другую за меньшее время, чем человеческая рука. Если многосуставной робот оснащен тактильными и силовыми датчиками в руках и запястьях, он может выполнять все более сложную работу.
Когда сустав руки многосуставного робота вращается под углом, другие суставы и их шатуны будут производить движение в пространстве. Соответственно, коготь достигает нового положения, при этом изменяется и направление (отношение) положения. Следовательно, обычный многосуставной робот должен управляться компьютером. Робот имеет датчики угла на каждом суставе. Учитывая угол поворота каждого сустава, задача определения пространственного положения и положения когтя руки называется задачей анализа управления движением. Напротив, учитывая положение и положение когтя руки, задача о том, на какой угол должен вращаться каждый шарнир шатуна, называется задачей синтеза движения. Ключом к решению этих проблем является то, как использовать компьютер для выполнения вышеуказанных преобразований и вычислений.








