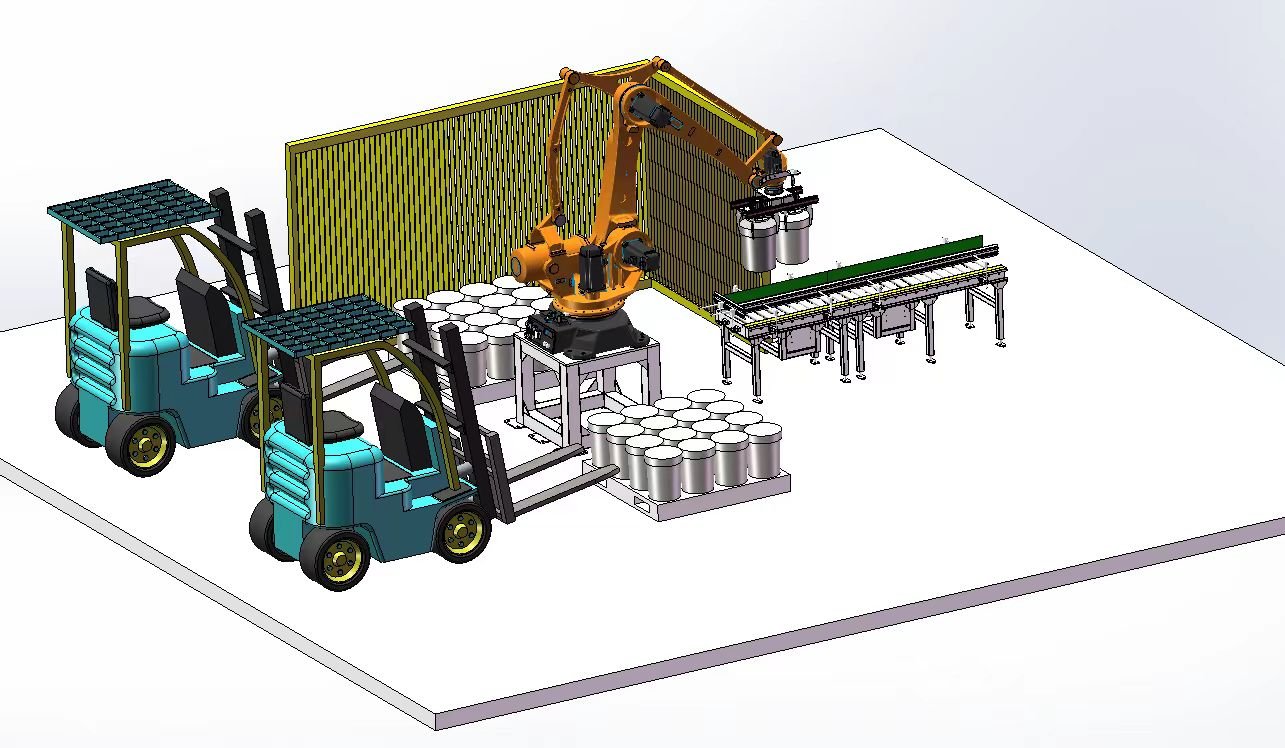



Автоматический совместный паллетайзер
Многосочленённая машина похожа на человеческую руку и отличается способностью к гибким движениям, подобно кисти руки. Например, при столкновении с препятствием многосочленённый робот может обойти его, чтобы достичь цели, что затруднительно для обычного промышленного робота с полярными или цилиндрическими координатами. Если требуется выполнить некоторые специальные движения (например, движение кривошипа), многосочленённый робот также проще в этом. Многосочленённый робот также может перемещаться из одной точки в другую за такое же короткое время, как человеческая рука. Оснащённый тактильными и силовыми датчиками в кистях и запястьях многосочленённый робот способен выполнять всё более сложную работу.
Когда сочленение в руке многосуставного робота поворачивается на угол, другие сочленения и их шатуны произведут движение в пространстве. Соответственно, клешня достигает нового положения, и направление (ориентация) положения также изменяется. Поэтому общий многосуставной робот должен управляться компьютером. Робот имеет датчики угла на каждом сочленении. Учитывая угол поворота каждого сочленения, задача получения пространственного положения и ориентации ручного когтя называется задачей анализа управления движением. Напротив, учитывая положение и ориентацию ручного когтя, задача определения угла, на который должен повернуть каждый соединительный стержень, называется задачей синтеза движения. Ключ к этим проблемам — как использовать компьютер для выполнения вышеуказанных преобразований и вычислений.