


Автоматический колонный робот
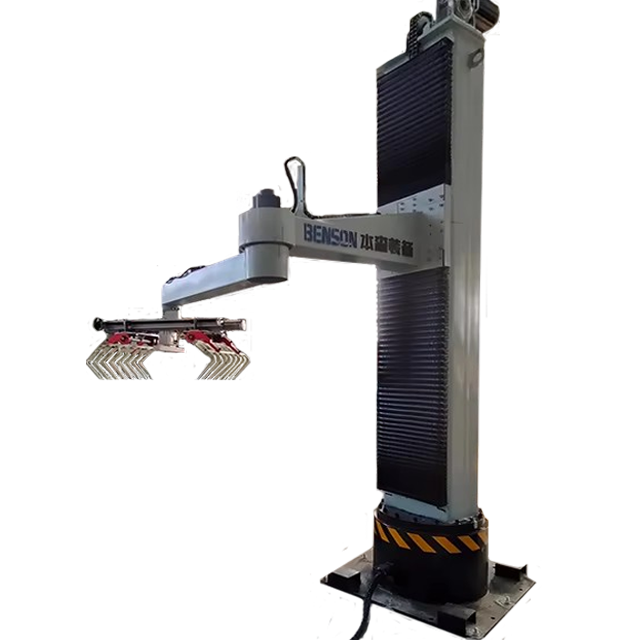
1. Конструкция колонны более компактна, что позволяет эффективно использовать вертикальное пространство и уменьшить занятость наземного пространства.
2. Его можно гибко настроить на различных производственных линиях, и его легче согласовать с расположением периферийного оборудования.
3. Благодаря высокоточным серводвигателям, передовым системам управления и точным механическим конструкциям можно достичь точного позиционирования и работы, а также точного захвата и размещения материалов.
4. Высокопрочная и высокожесткая механическая конструкция выдерживает большие нагрузки и давление и остается стабильной в течение длительного срока эксплуатации.
5. Разработанный для промышленных условий, он может стабильно работать в суровых условиях труда, таких как пыль, влажность и высокая температура, а также адаптироваться к производственной среде различных отраслей промышленности.
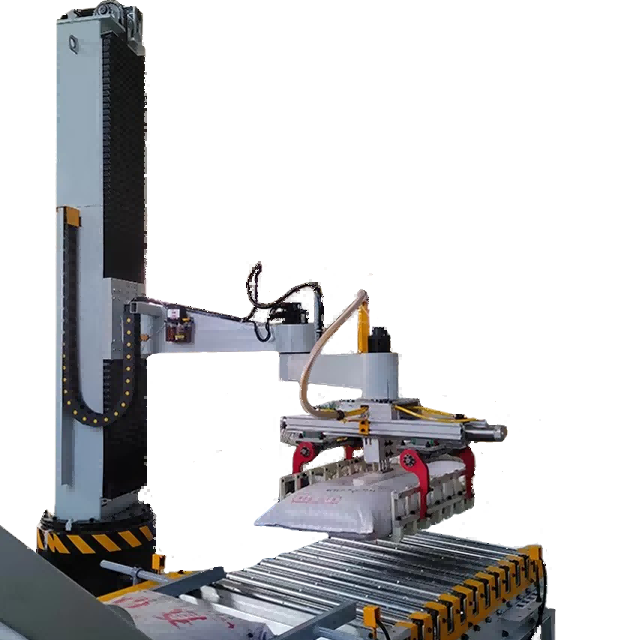
6. Обычно это часть полностью автоматизированной производственной линии, которую можно легко соединить с другим оборудованием, таким как упаковочные машины, ленточные конвейеры и системы хранения.
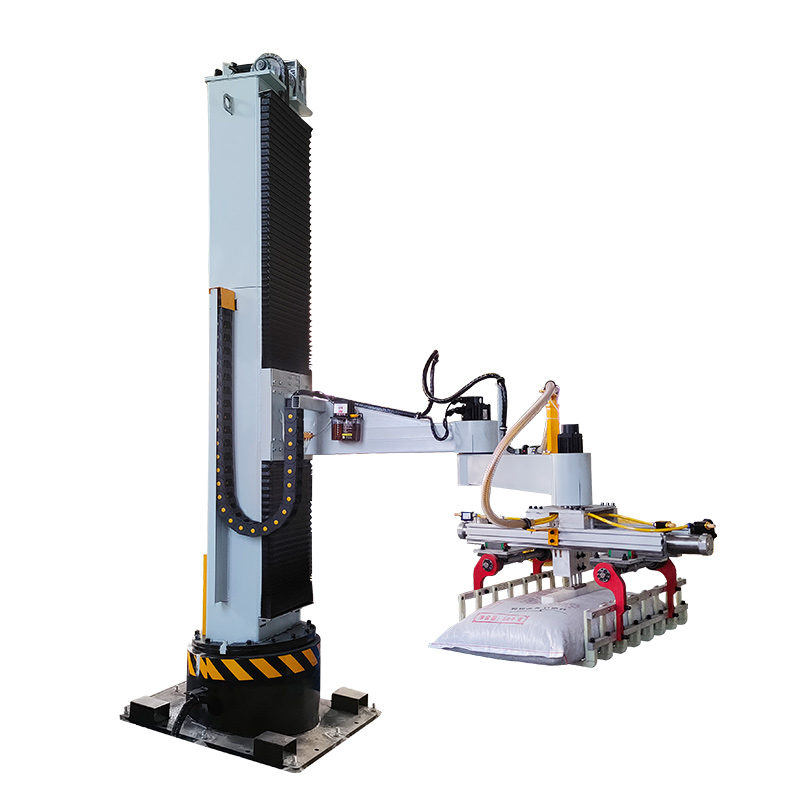
Обычно он состоит из вертикальных колонн, рычагов, манипуляторов и грузовых зажимов. Вертикальные колонны обеспечивают поддержку и устойчивость робота, рычаги соединяют колонны и манипуляторы, позволяя манипуляторам перемещаться в разных положениях, а манипуляторы и грузовые зажимы используются для захвата и размещения объектов.

Система управления отвечает за направление робота для выполнения различных действий. С помощью предустановленных программ или инструкций в реальном времени достигается точный контроль каждой оси робота, что обеспечивает точность и стабильность работы.

В системе питания обычно используются серводвигатели в качестве источника энергии для обеспечения движения робота. Его преимущества заключаются в быстрой скорости реакции, высокой точности управления и плавности работы, что позволяет роботу точно выполнять такие действия, как захват и переноска.

Обычно существует 4 степени свободы, такие как ось S, ось Z, ось R, ось T и т. д. Каждая ось может перемещаться в разных направлениях, что позволяет роботу гибко действовать в пространстве.

Максимальная нагрузка обычно составляет около 100 кг. Роботы с различной грузоподъемностью могут быть выбраны в соответствии с реальными потребностями и соответствовать требованиям по переноске предметов разного веса.

Максимальный радиус движения может достигать около 1950 мм, что определяет рабочий диапазон и рабочую зону робота. Точность повторного позиционирования может достигать ±0,3 мм, обеспечивая точность и последовательность работы робота.




