
Паллетизирующий робот одиночный когтя
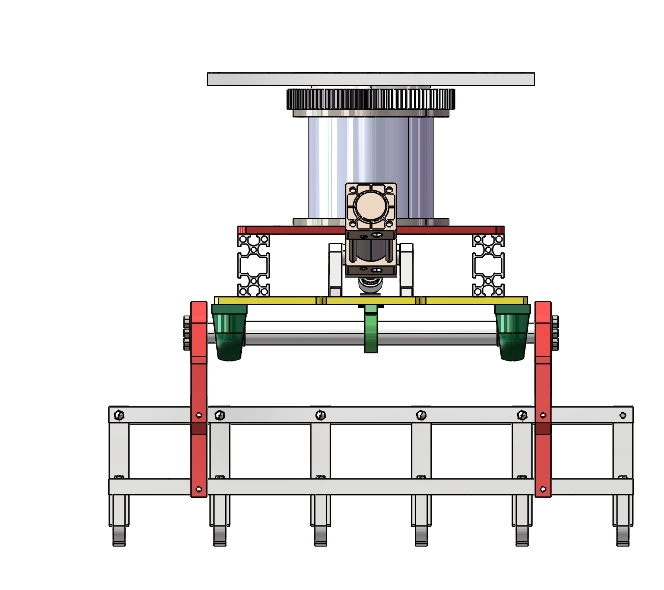
1. Уловка с одним кольцом имеет относительно простую структуру и компактную общую конструкцию, которая не только снижает затраты на производство и сборку, но и снижает возможные точки отказа, вызванные сложными структурами.
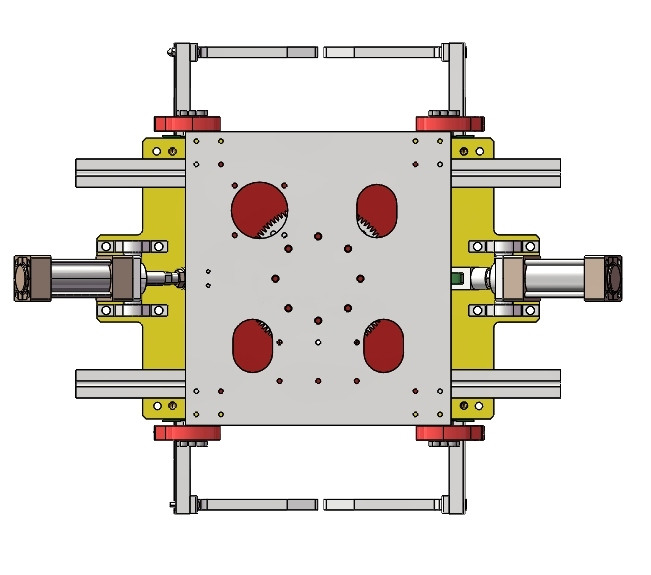
2. Логика управления относительно проста и должна контролировать движение одного когти, что облегчает точное управление во время программирования и отладки.
3. Уловка с одним кольцом может быть оснащена высокими датчиками и усовершенствованными системами управления для более точного определения местонахождения и схватки товаров.
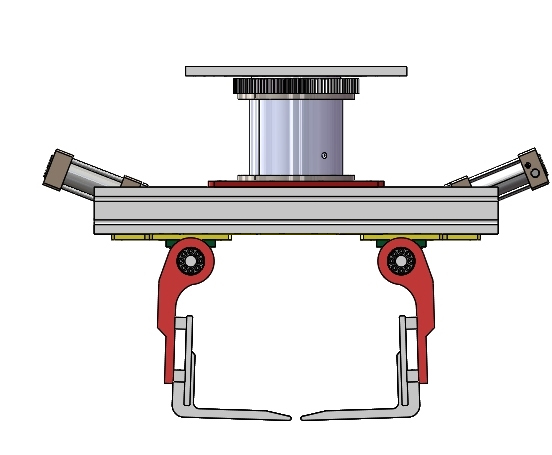
4. Когда единый когтя охватывает товары, вся сила захвата сосредоточена на одной точке или одной поверхности, что может обеспечить более концентрированную и стабильную силу захвата.
5. Из-за его относительно небольшой и гибкой структуры, захватыватель с одним кольцом легче работать в небольшом пространстве и может быть более удобно установлен и используется.
Обычно используется высокопрочный алюминиевый сплав или нержавеющая сталь. Корлочное тело из алюминиевого сплава, имеет легкий вес, что может уменьшить нагрузку робота и улучшить скорость бега и гибкость.

Он подключен к поддонскому руке робота через высокие суставы и устройства передачи. Суставы в основном используют гармонические редукторы или планетарные редукторы с высокой точностью передачи и большим крутящим моментом, что может обеспечить точность и стабильность движения отдельного когтя.

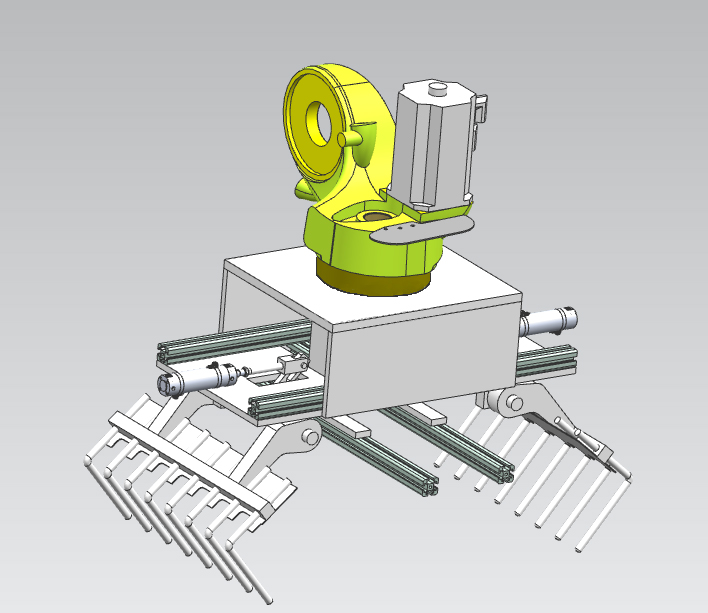
В зависимости от сценариев применения и захватывающих объектов, форма внешнего вида одноколотого захвата имеет множество дизайнов.

Захватывающая сила и положение могут автоматически скорректироваться в зависимости от веса, формы и размера товара.

Он глубоко интегрирован с системой управления паллетизацией и может выполнять паллетизирующие задачи в сотрудничестве с роботизированной рукой в соответствии с предустановленными программами и инструкциями.




