
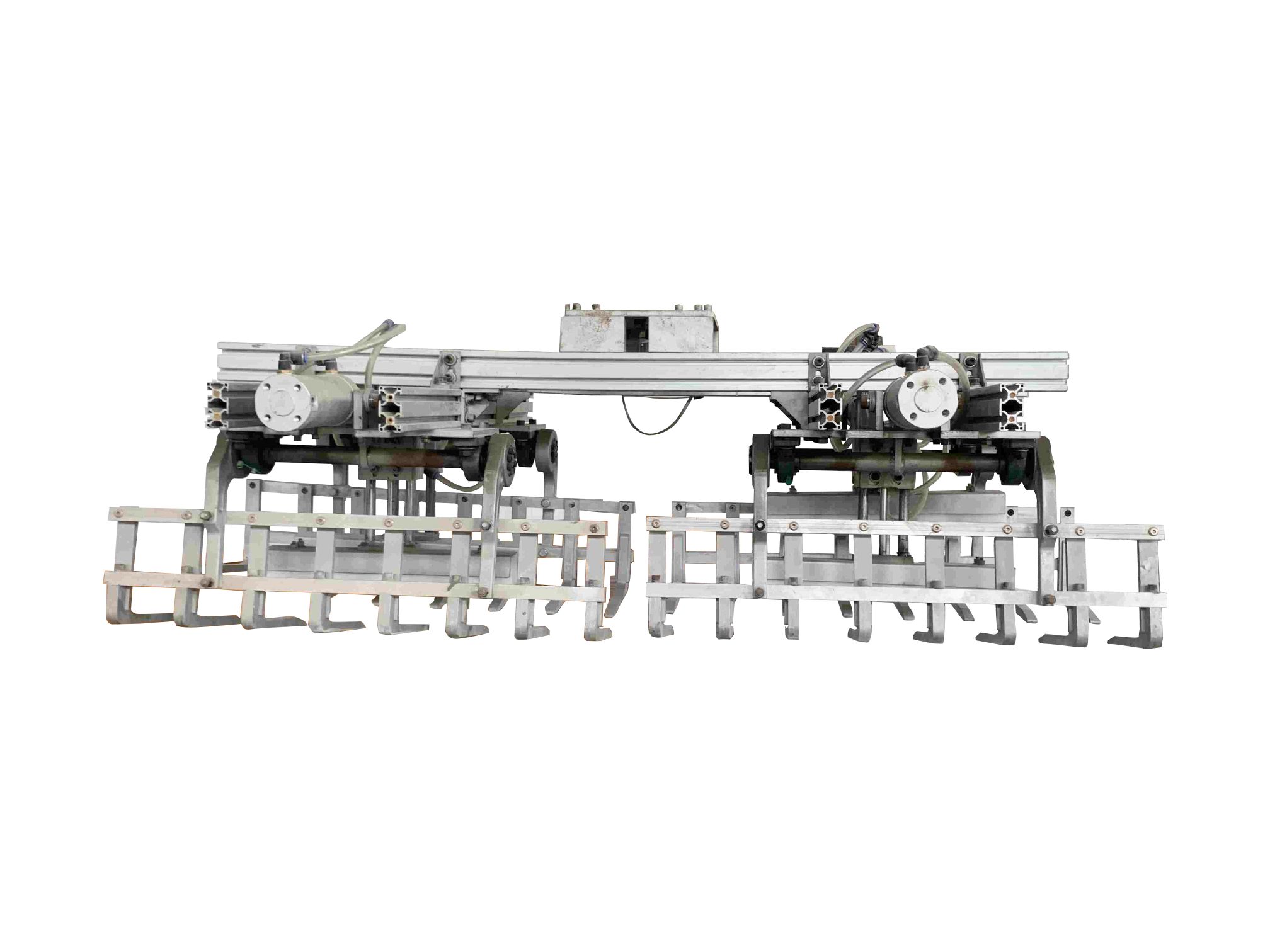




Паллетизирующий робот с двойным когтя
1. Конструкция двойного когтя позволяет роботу захватывать два предмета одновременно или захватывать предметы из разных позиций, эффективно уменьшая количество захватов и, таким образом, сокращая время паллетизации.
2. Обычно оборудован более мощной системой привода и структурной конструкцией, два когти работают вместе, чтобы рассеять нагрузку и может иметь больший вес.
3. Два когти могут перемещаться независимо или в координации, и могут гибко отрегулировать метод захвата в соответствии с формой и размером товара.
4. Двойные когти могут быть точно настроены, чтобы достичь более точного позиционирования и размещения при размещении товаров на поддонах или назначенных местах.
5. Двойные когти симметрично распределены или разработаны в соответствии с принципами механики, которые могут лучше поддерживать баланс при захвате товаров. Двойные когти могут компенсировать несбалансированную силу товара, регулируя прочность и положение.
Он состоит из двух независимых когтей, которые могут работать вместе. Когти обычно изготовлены из высокопрочного алюминиевого сплава или нержавеющей стали. Они обладают характеристиками легкого веса, высокой прочности и коррозионной стойкости и могут адаптироваться к различным суровым рабочим средам.
 Он связан с концом роботизированной руки робота паллетизации через высокие суставы, подшипники и устройства передачи, чтобы обеспечить стабильность и точность двойных когтей во время движения.
Он связан с концом роботизированной руки робота паллетизации через высокие суставы, подшипники и устройства передачи, чтобы обеспечить стабильность и точность двойных когтей во время движения.
 Датчик давления используется для мониторинга захвата силы когтей в режиме реального времени, чтобы предотвратить повреждение товара из -за чрезмерной захваты или падения из -за недостаточной силы захвата; Датчик положения может точно обращать внимание на положение и позу когтей.
Датчик давления используется для мониторинга захвата силы когтей в режиме реального времени, чтобы предотвратить повреждение товара из -за чрезмерной захваты или падения из -за недостаточной силы захвата; Датчик положения может точно обращать внимание на положение и позу когтей.

Различные режимы захвата могут быть гибкими переключениями в зависимости от формы, размера и веса товаров, таких как параллельное захват, охватывание и захват бокового зажима.
 Двойные когти могут автоматически регулировать силу захвата и положение в соответствии с фактической ситуацией товара. При захвате более легких товаров когти автоматически уменьшат захват силы, чтобы избежать повреждения товара.
Двойные когти могут автоматически регулировать силу захвата и положение в соответствии с фактической ситуацией товара. При захвате более легких товаров когти автоматически уменьшат захват силы, чтобы избежать повреждения товара.




